Frequency stabilization of interconnected diverse power systems with integration of renewable energies and energy storage systems
October 27, 2024
Abstract
Recent improvements in renewable energy sources (RESs) and their extensive use in the power industry have created significant issues for their operation, security, and management. Due to the ongoing reduction of power system inertia, maintaining operational frequency at its nominal value and minimizing tie-line power variations constitute essential variables for these improvements. A novel improved frequency stabilization approach based on modified fractional order tilt controller is presented for interconnected diverse power systems with integration of sea wave energy, photovoltaic, wind, energy storage system and biodiesel generator. The fractional order tilt integral double derivative (FOTIDD2) is a novel controller that is developed to address the frequency stabilization problems of a hybrid power structure that is integrated with sources of clean energy and devices for storing energy. A recent optimization algorithm inspired by human behavior called mother optimization algorithm (MOA) is applied to adjust the coefficient of the proposed cascaded controller. The FOTIDD2 controller was compared with other control methods in terms of its transient performance, in order to determine its effectiveness. Further, the mother optimization algorithm results are compared with those of sine cosine algorithm (SCA), fox optimization algorithm (FOA), and grey wolf optimization (GWO). FOTIDD2 controller was found to be more effective than PID controller in respect of reducing overshoot (Osh) by 79.31%, 83.78% and 67.99%, improving time settlement by 33.22%, 29.87%, and 22.45% and reducing undershoot (Ush) by 79.13%, 89.34%, and 86.90% for the (∆F1), (∆F2), and (∆Ptie), respectively.
Introduction
Background
Renewable energy sources (RESs) are becoming increasingly popular in order to solve the problems associated with non-renewable energy sources, such as environmental impact and limited supply. Wind energy, biodiesel and photovoltaic (PV) generation are just a few examples of renewable energy sources that are being used to replace non-renewable supplies1,2. A dependable and strong power infrastructure that can accommodate the intermittent nature of many renewable energy sources must also have energy storage devices and cooperative management of electric vehicles. Modern optimization techniques such as stochastic optimization and resilience optimization can further improve the performance of the electricity sector. These strategies can be applied to the power infrastructure in order to meet the growing demand for electricity while reducing its negative environmental impacts3,4.
The power grids that are based on renewable energy sources may have difficulty managing swings in power supply and demand owing to irregular loading patterns. The presence of renewable energy sources (RES) can have a negative impact on the power system in several ways, such as reducing inertia, causing unpredictable loading patterns, and slowing the response time to disturbances as a result of intermittent power generation5. Weather conditions and other factors can have a significant effect on the output of renewable energy sources; therefore, it can be difficult to maintain a stable and reliable grid based on renewable energy sources. RES-based power infrastructures may also have difficulty responding to disruptions due to their inability to swiftly adjust to abrupt changes in power demand or supply. In addition, there are a lot of benefits to connecting networks that use renewable energy6. Renewable energy technologies have the potential to cut greenhouse gas emissions while also helping to establish a more sustainable energy system7,8. Efforts are being made to improve the dependability and stability of the grid in order to address the problems that are connected with power networks that are dependent on renewable energy sources.
Literature review
Many power system designs have been successful in solving the problem of frequency stability. The studies in9,10 focused on load frequency control (LFC) for single-area systems, the research conducted in11,12,13 focused on a multi-zone system with non-linearities, and the studies in 14,15 looked at a deregulated electricity grid. To handle the issue of load frequency management in PS, various control approaches have been implemented. Model predictive control (MPC)16, artificial intelligence (AI) based approach17, robust control approaches (RCA)18, and fuzzy logic control (FLC)19,20 are a few examples. Because of its inexpensiveness and widespread availability, the classic PID control system has dominated academic research. There is still a long way to go before a PID device can adapt to system disturbances and non-linearities through failures and successes. Therefore, a lot of time and energy has been spent studying the optimal values for the PID controller. Different optimization strategies have been employed to the LFC dilemma, leading to a PID design methodology that has proven effective21,22.
To overcome the complexity of the control schemes, new clever algorithms are used to tune the controller parameters. For instance, the authors in23 employed a self-tuned algorithm for the automatic generation control problem with multiple sources like hydro, thermal with the integration of wind penetration. Barakat in reference24 proposed a FOPID-FOPI controller which has been optimized with a chaos game optimization (CGO) employed for the load frequency regulation of interconnected PS’s. Daraz et al. in25 employed FOI-PD optimized with an Improved based Fitness Dependent Optimizer for the automatic generation control (AGC) of dual area, multi-generation PS, s. Pawan and Anil in26 demonstrated the superiority of the WHO-optimized FTIDF-(1 + I) controller over conventional TIDF and FTIDF controllers in handling nonlinearities and uncertainties within the micro-grid. Similarly, other metaheuristic computational techniques were also employed to regulate the frequency of interconnected power systems like artificial ecosystem optimization algorithm (AEO)27, butterfly optimizer algorithm (BOA)28, pathfinder optimizer algorithm (PFA) based FOTID controller29, Modified FOPID controller tuned with Jellyfish search optimization (JSO)30, atom search optimization31, FOI-TDN based hybridized FDO with sine cosine algorithm32, marine predator algorithm (MPA)33, equilibrium optimization Algorithm (EOA)34, PI-TDF tuned salp swarm algorithm (SSA)35, artificial gorilla troops optimizer (GTO)36 and FOPID based optimized imperialist competitive algorithm (ICA)37. More flexibility is provided by the additional tunable parameters on the TID/FOPID controller38. Data showed that the I/PI/PID controller was not as effective as the TID utilizing filter (TIDF) set using DE39. Another example is the water cycle algorithm (WCA) tuned tilt-integral-derivative (TID) controller, which outperforms PID/TID controllers in terms of efficiency40.
Due to its effectiveness and higher operation, the cascaded controller design has recently been utilized in place of the conventional controller configuration. In order to improve frequency stability in PS, various cascaded controller types have been used41,42,43,44. Another approach to LFC study that focuses on integrating two controllers was recently examined45,46. A two-area connected power structure’s frequency changes can be reduced using an I-PD controller structure, which was also suggested by authors in47. I-PD controller performance is superior to PID controller performance. Additionally, references48,49 suggested the integral-tilt derivative (ITD) controller for the adaptation of system frequency. Compared to the TID controller, the ID-T controller offers superior frequency performance50. Prior research indicates that frequency regulation significantly impacts on choosing the idle parameters of the controllers which has been improved by using evolutionary optimization methods.
To retrieve the ideal coefficient for the suggested FOTIDD2 controller, this research work introduces a novel metaheuristic approach termed the mother optimization algorithm (MOA) is introduced, stimulated by the nurturing dynamics between child and mother51. MOA mimics a mother’s care through three key phases: (1) Education (2) Guidance, and (3) Training. The mathematical framework of MOA, applied for seek and exploration, is detailed. Assessing MOA’s effectiveness involves testing it across 52 benchmark functions, covering various types like unimodal and high-dimensional multi-modal functions, as well as the CEC (2017) test set. As the results show, MOA’s technique is a great help in the seek practice, offering practical solutions to optimization difficulties by comparing exploration and exploitation.
Motivition and contribution
Prior research primarily found that controller designer-creative LFC solutions (e.g., FLC, H-infinite methods, as well as MPC) satisfy recital requirements but suffer from multiple design defects and time-consuming control setting selection processes. Traditional PD/PI/PID controllers also have trouble adjusting to system uncertainty. Robustness assessments, including system nonlinearities and system boundary fluctuations, have received insufficient attention in several earlier papers. Additionally, by incorporating system uncertainties/nonlinearities, and concurrent load variations, most earlier considerations faded to take into account the extensive amalgamation of renewable energy in the absence of changes to system parameters.
This work suggests a unique FOTIDD2 controller that enhances system frequency steadiness while taking renewable power agitations into account. The suggested FOTIDD2 controller’s parameters were additionally set up in accordance with the MOA to ensure system consistency and frequency in atypical scenarios. The paper’s main contribution is summarized as follows, in contrast to other research on relevant topics:
-
Developed and implemented a trustworthy FOTIDD2 controller to improve frequency steadiness for two region diverse connected power systems with sea wave energy (SWE), battery energy storage (BES), photovoltaic (PV) generation, wind energy, capacitive energy storage (CES) and bio-diesel generator (BDG).
-
A newly developed intelligent metaheuristic approach, known as the Mother Optimization Algorithm (MOA), is employed to determine the optimal gains for the FOTIDD2 controller.
-
Demonstrated through extensive simulations and analyses that the FOTIDD2 controller significantly outperforms traditional controllers such as Fractional Order PID (FOPID), PID, and I-PD controllers in maintaining frequency stability.
-
Highlighted the effectiveness of the MOA algorithm by comparing its performance against other contemporary optimization algorithms, including the Fox Optimizer Algorithm (FOA), Grey Wolf Optimization (GWO), and Sine Cosine Algorithm (SCA), showcasing its superior capability in optimizing controller parameters.
-
Rigorously evaluated the resilience of the FOTIDD2 controller under significant variations in system elements, confirming its ability to maintain stability and performance in diverse hybrid power systems.
Investigated power system
This section describes the mathematical modelling of a dual area PS that is integrated with sea wave energy (SWE), Battery energy Storage (BES), Photovoltaic generation (PV), wind energy, energy storage system and marine biodiesel generator and is depicted in Fig. 1. The system is created in Simulink/MATLAB using the PS material from52,53, which is included in (Online Appendix A). The complete system has a total nominal power rating of 90.600 MW, with the following component ratings: Sea Wave Energy (SWE) = 40 MW; Wind Turbine (WT) = 40 MW; Solar Power = 10 MW; Capacitor Energy Storage (CES) = 350 KW; Battery Energy Storage (BES) = 250 KW, Biodiesel Generator (BDG) = 60 KVA.
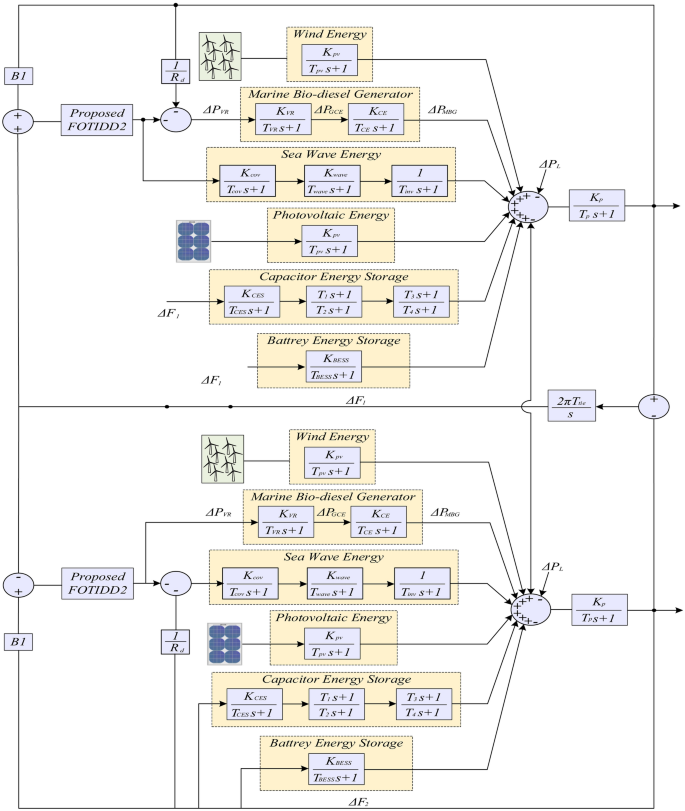
Mathematical modelling of diverse interconnected power systems.
Furthermore, this study considers a communication time delay (CTD) of one second, to make the power system more realistic. The modelling of the rest of other PS units are given in the subsections.
Photovoltaic and wind plant modelling
The solar incandescence and surrounding temperature of panels determine the operational point of PV services. Variations in irradiance cause PV plants to produce inconsistent amounts of power. The following is an expression for the output power models from solar power plants54,55.
where (varphi_{solar}) denotes the solar insolation (in W/m2), ƞ denotes the conversion efficiency of the PV panel, (T_{a}) denotes the surrounding temperature and S denotes the PV area (in m2). Based on the model from56, a practical output power for PV has been developed in this study to simulate its intermittent characteristics. In addition, for PV and wind plants, a first order TF is utilized. The PV system modeling description (G_{PV} left( s right)) is as follows55.
where (T_{PV}) and (K_{PV}) stand for the PV model’s time and gain constant, respectively.
Wind energy can be expressed as follows55,56.
where (rho) is the air density in kilograms per cubic meter, (A_{r}) is the swept area in square meters, the wind speed is represented by (V_{omega }^{3}) in meters per second while the power coefficient is denoted by Cp. The following is a model representation of (G_{w} left( s right))53.
in which (T_{T}) represents the time in the wind model and (K_{T}) stands for the gain constant.
Mathematical formulation of bio-diesel generator (BDG)
A modern MBG set produces electricity at a level analogous to that of a conventional diesel generator. The consideration of their use is also prompted by the materials recommended in this research study’s inherent lack of toxicity, environmental friendliness, and favorable impact on air quality. Referring to Fig. 2, the linearized model for MBG is shown as follows6,7,57.
where U(s) and (Delta u_{MBG}) indicate the difference between the effort error of the MBG and the output mechanism indication of the controller, respectively.
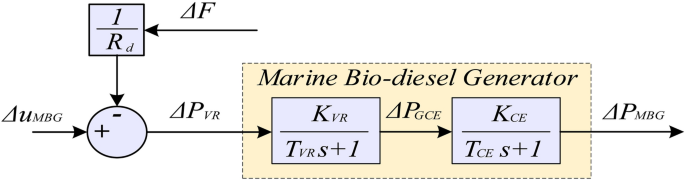
Mathematical modelling for BDG.
Mathematical formulation of sea wave energy (SWE)
Connecting the wave system to the permanent magnetic synchronous generator is the main objective of this technology. The structure’s dynamics with regard to force and velocity are described by the following computations58,59.
Modelling of battery energy storage system (BESS)
Modern advancements in power electronics have allowed battery energy storage systems (BESS) to quickly control their active and reactive power output at switching frequencies much beyond kilohertz. Although load balancing, harmonic distortion reduction, and voltage regulation are frequently their main uses, once these systems are established, they can also improve dynamic and transient stability by adding more damping to power system oscillations. A BESS also has a DC battery bank that is linked to the AC system via transformers, in supplement to the power electronic converter55.
Modelling of capacitor energy storage
The CES is acquiring popularity in contemporary PS due to its capacity for rapid charging and discharging with a high-power density60. The benefit of CES is that it provides abundant electricity in response to an increase in demand. Both the cost and the ease of usage are attractive. Equation (12) 43 represents the change in incremental power of CES.
where T1 − T4 represent the time constants of phase compensation blocks with two stages.
Mother optimization algorithm (MOA)
In this paper, the Mother Optimization Algorithm (MOA) is introduced, a new method nurturing dynamics between child and mother51. MOA mimics a mother’s care through three key phases: (1) Education (2) Guidance, and (3) Training. The mathematical framework of MOA, applied for seek and exploration, is detailed. Assessing MOA’s effectiveness in-volves testing it across 52 benchmark functions, covering various types like unimodal and high-dimensional multi-modal functions, as well as the CEC (2017) test set. The results highlight that MOA’s methodology, which compares exploitation and exploration efficiently aids in the seek practice, providing viable solutions for optimization problems. Undoubtedly, the family is society’s fundamental educational institution, with the mother playing an important role in child development. A mother imparts valuable abilities to her children through her life experiences and guidance, and they learn and grow as a result of her teachings. Three important processes underlie a mother’s interactions with her children: education, guidance, and parenting. Thus, the Mother Optimization Algorithm (MOA) is designed to mimic these nurturing and teaching actions via mathematical modeling.
Mathematical representation
The suggested MOA introduces a population-centric algorithm for addressing optimization challenges iteratively. The population of solutions in this algorithm is represented as vectors in the problem space. Equation (13) describes the population structure of this population, which is initialized by Eq. (14) at the beginning of the optimization process. Every member in the population discloses the values of their decision variables, which are determined by their position in the search space. This allows the occupants to collectively seek for the optimal solution.
In the proposed MOA, X denotes the population matrix, where N stands for the population size and m represents the number of decision variables. Each candidate solution, Xi = (xi,1, …, xi, j, …, xi, m), comprises m variables, with xi, j indicating the jth variable of the ith solution. Random numbers between 0 and 1 are generated by the function rand (0,1). The lower and upper bounds of the jth decision variable are denoted by lbj and ubj, respectively. Each member of the MOA population represents a potential solution to the optimization problem. The problem’s objective function is assessed based on the decision variable values suggested by each population member is represented by Eq. (15).
Phase 1: education (exploration)
The initial stage, named “Education,” in the suggested MOA method is motivated by the educational process of children. Its goal is to enhance global seek and searching abilities by employing substantial modifications in the positions of inhabitant’s participants. In the MOA model, the mother is seen as the optimal delegate of the inhabitants, and her nurturing activities towards her children serves as the basis for simulating the instruction phase. At this point, Eq. (16) is used to produce a new place for each participant. Once the optimal value increases with the new location, it is considered to be the position of the respective representative, as described in Eq. (17).
where Mj represents the jth dimension of the mother’s position, xi,j indicates the (jth) dimension of the (ith) inhabitants participant’s position Xi. (X_{i}^{P1}) denotes the new position and (x_{i,j}^{P1}) representing its jth dimension. (F_{i}^{P1}) represents its cost function value. The function “Rand (0,1)” produces a random integer that follows a uniform sharing within the range of [0,1]. On the other hand, “rand (2)” produces a random integer that follows a uniform sharing within the range of [1, 2].
Phase 2: guidance phase (exploration)
A key responsibility of mothers in nurturing their children is to offer guidance and discourage misconduct. In order to make the MOA more effective in worldwide seek and adventure, the advisory stage is planning to make significant changes to the locations of the inhabitant’s participants. In the MOA framework, each population participant regards the spot of other adherents with a higher objective function value as undesirable behavior to be avoided. The set of undesirable behaviors (denoted as BBi) for each member is determined by using Eq. (18). For each Xi, a participant is arbitrarily chosen from the set of undesirable actions BBi. Initially, a new location is generated for each participant employing Eq. (19) to mimic steering the kid away from undesirable behavior. Afterwards, if this new position results in an enhancement of the desired function value, it substitutes the old position of the associated member based on Eq. (20).
In this context, BBi represents the collection of undesirable behaviors associated with the ith member of the population, while SBBi denotes the specific undesirable behavior selected for this member. (SBB_{i,j}) refers to its jth dimension. (X_{i}^{P2}) signifies the updated position.
Phase 3: training phase (exploitation)
Mothers employ diverse methods to motivate children to enhance their skills during the educational journey. In the MOA phase, upbringing contributes to enhancing local search and exploitation capabilities by implementing subtle adjustments in the positions of population members. In order to simulate the early stages of development, a new location is initially established for each representative of the population. This position is determined by modelling the personality development of youngsters using Eq. (21). Equation (22) describes the process of replacing a member’s previous position with a new one if the new position improves the value of the objective function.
(X_{i}^{P3}) represents the updated position calculated for the ith member of the population during the third phase of the proposed MOA, where (x_{i,j}^{P3}) denotes its jth dimension, and (F_{i}^{P3}) represents its objective function value. The procedural stages of the suggested MOA are represented by a flowchart in Fig. 3.
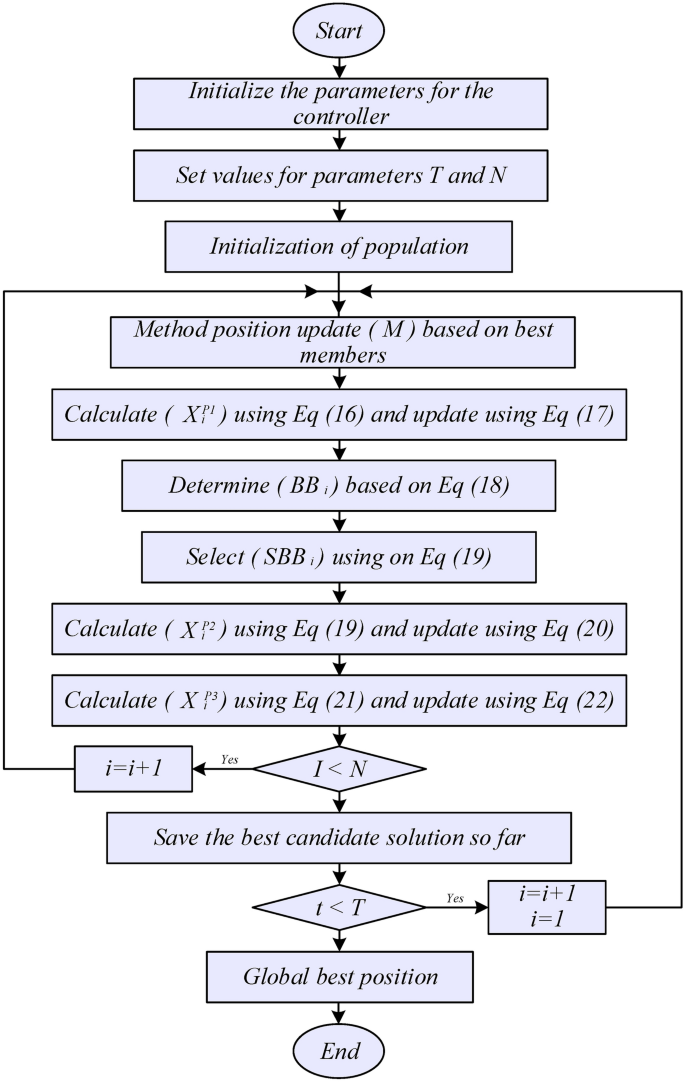
Flowchart for the mother optimization algorithm.
Controller structure and fitness function
In many power system setups, Load Frequency Control (LFC) makes use of a number of different controllers, both integer and fractional in sequence. In recent research, the Proportional-Integral-Derivative (PID) controller is extensively used to handle frequency stability issues. The transfer function of the PID controller is commonly expressed as follows:
A TIDN (Tilting Integral Derivative with Filter) controller replaces the proportional component of a PIDN (Proportional Integral Derivative with Filter) controller with a tilting element represented by Eq. (24). This change in the controller’s design results in an output transfer function that is more closely related to an optimal configuration, increasing the effectiveness of the feedback control system. Similarly, while a PID controller’s derivative part aids in stability of the system along with speeds up controller response, but also has the potential to cause the plant to receive control inputs that are excessively large61. This issue arises from noise present in the control signal, which is a common occurrence in practical systems. To address this, a first-order filter can be incorporated into the derivative term, with the pole carefully adjusted to minimize chattering induced by noise.
Despite numerous attempts to improve the control performance of Load Frequency Control (LFC) systems, the FOTIDD2 (Fractional Order Tilting Integral Double Derivative) controller has not been used in research to yet. However, past investigation has exposed that FOTID and TIDD2 controllers outperform classic PID and TID controllers in respect of performance. Figure 4 reveals the block illustration of the FOTIDD2 controller, which combines the TIDD2 regulator and fractional calculus. Unlike the TIDD2 controller, the FOTIDD2 controller handles the second derivative component as a tilt order derivative. Equation (25) defines the FOTIDD2 controller’s transfer function.
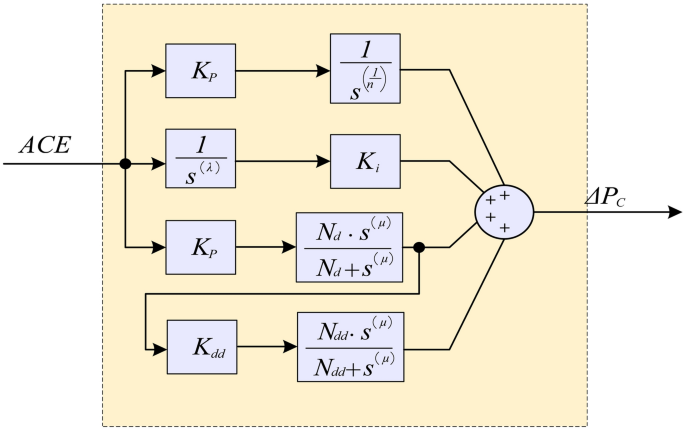
Structure of proposed FOTIDD2.
The operators (λ, µ, n) denote the integral, differentiator, and tilt order operators, respectively. The filter constants are denoted by Nd and Ndd, whereas (Kp, Ki, Kd) represent the FOTIDD2 controller’s proportional, integral, and derivative coefficients. Reducing the cost function using the mother optimizer method allowed us to determine the suggested coefficients for the FOTIDD2 controller. Using an ITSE-based cost function shortens the settling period and quickly dampens high oscillations1,60.
Controller gains for FOTIDD2 are restricted as follows.
Results and discussion
Using a variety of hybrid power sources including solar, wind, biodiesel, sea wave energy, battery energy storage, capacitive energy storage, and biodiesel, this study tests the validity and efficacy of a novel FOTIDD2 controller. The suggested controller coefficients are fine-tuned using the mother optimization approach in MATLAB and integrated with the power system’s Simulink tool in order to achieve the LFC objective function. The case study’s MOA-based controller coefficients are shown in Table 1, which is the outcome of 80 optimization iterations utilizing data from Online Appendix B. In this work, the 25 independent trials are run for MOA: FOTIDD2, FOA: FOTIDD2, GWO: FOTIDD2 and SCA: FOTIDD2 considering ITSE objective function. The mean, standard deviation, best values, and computational time were recorded in Table 2. The performance results presented in Table 2 indicate that MOA.
consistently achieves lower mean and standard deviation values compared to the other algorithms. Additionally, MOA also demonstrates a shorter computational time relative to the other approaches. The case studies that follow critically examine the outcomes of the analyzed multi-area IPS.
Scenario-1
The study evaluated the performance of the mother optimization algorithm (MOA) approach against other optimization algorithms, including GWO, hDE-PS, FOA, SCA and FPA, in terms of overshoot (Osh), minimum undershoot (Ush), and time settling (Ts) considering, change in area-2 (∆F2), change in tie line (∆Ptie) and change in area-1 (∆F2). Overall, Table 3 compares the optimization algorithms’ overall performance on various metrics. It seems that the MOA approach has performed better than the other algorithms based on the results presented in Fig. 5a–c and Table 3. The FOTIDD2 controller tuned with the MOA approach has shown improvements in settling time for (∆Ptie), (∆F2), and (∆F1) by (19.11%, 17.34% and 15.10%), (16.87%, 31.22% and 25.07%), (35.88%, 26.24% and 23.89%) as compared to GWO, FOA and SCA algorithm respectively. Table 3 shows that the MOA method has outperformed than SCA strategies in terms of Ush (75.12%, 67.19%, and 87.22%) and Osh (65.22%, 77.29%, and 79.22%) for (∆F1), (∆F2), and (∆Ptie), respectively. Furthermore, when compared to a GWO methodology, the MOA algorithm has significantly reduced overshoot by 69.33%, 73.01%, and 58. 22% for (∆F1), (∆F2), and (∆Ptie), respectively. Similarly, when compared to a FOA approach, the MOA algorithm has significantly reduced undershoot by 29.30%, 17.11% for (∆F1) and (∆F2), and almost same overshoot for tie-line power (∆Ptie). Additionally, Table 3 indicates that the suggested MOA approach outperforms GWO, SCA, DTBO1, FPA29, and WCA40 methods for modifying area 2 (∆F2), altering the connecting tie line (∆Ptie), and modifying area 1 (∆F1). Therefore, the MOA approach seems to be a promising technique for improving the performance of the FOTIDD2 controller in power systems.
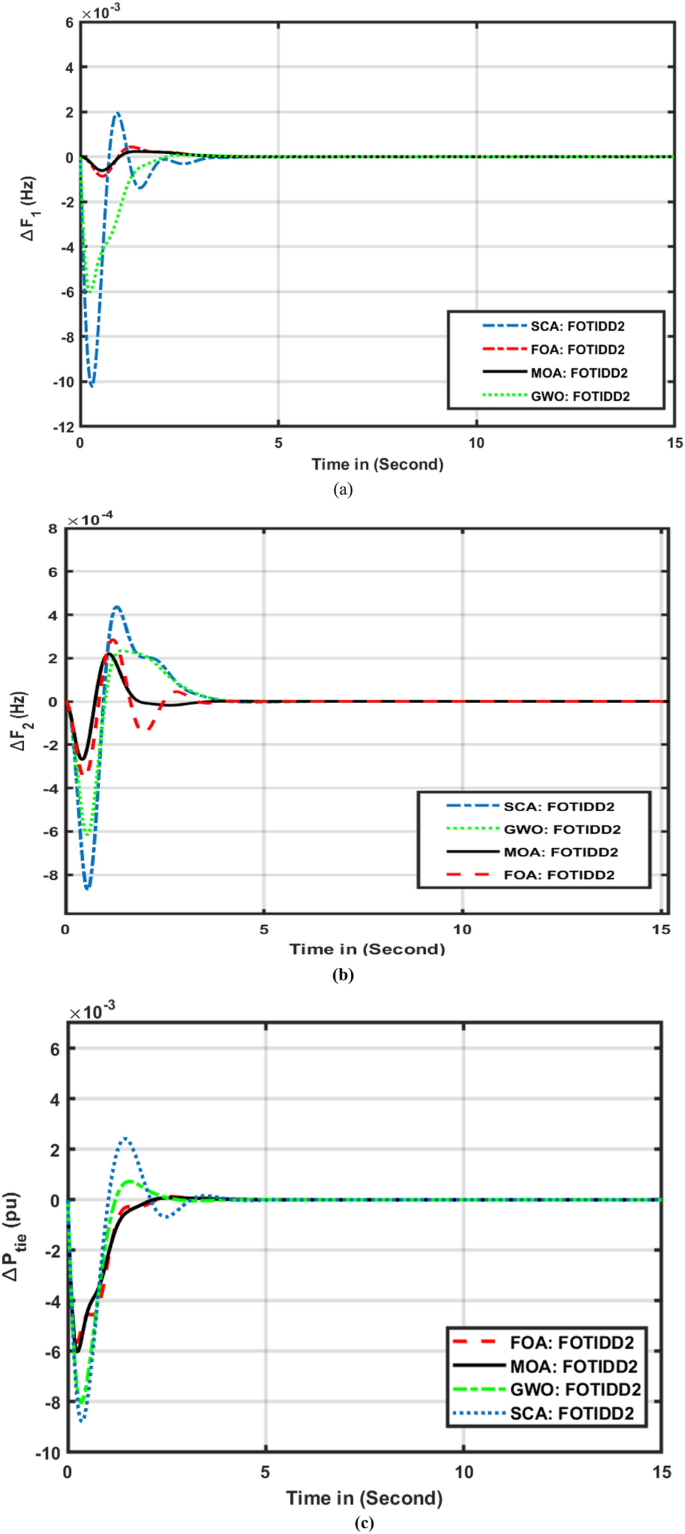
Dynamic response of various algorithms for (a) ∆F1 (b) ∆F2, (c) ∆Ptie.
Scenario-2
In this instance, the performance of MOA-FOTIDD2 controller was compared to that of FOPID, I-PD, PID, and FOTID controllers. The outcome of every controller was evaluated for modifications to area-1 (∆F1), tie line (∆Ptie), and area-2 (∆F2), as shown in Fig. 6a–c. It can observe how various controllers fare when it comes to transitory metrics like Osh, Ush, and Ts for (∆F2), (∆Ptie), and (∆F1) in Table 4. When compared to the MOA-PID, MOA-I-PD, and MOA-FOPID control systems, the MOA-FOTIDD2 technique caused settling times to be faster in regions 1, 2 as well as the connected tie-line. In comparison to MOA algorithm based PID controller, the FOTIDD2 controller tuned with MOA techniques reduced overshoot for (∆F1), (∆F2), and (∆Ptie) by 78.11%, 64.44%, and 39.65%, respectively. Significant improvements of 12.21%, 23.43%, and 19.56% in settling time were also achieved. In contrast to the I-PD controller, the MOA-based tuned FOTIDD2 controller provides a significant improvement of 11.33%, 15.96%, and 22.12% in terms of Ts, while effectively reducing the undershoot by 34.13%, 49.44% and 31.11% for (∆F1), (∆F2), and (∆Ptie). The MOA-based FOTIDD2 controller improves the Ts by 23.81% for (∆Ptie), 27.62% for (∆F2), and 23. 20% for (∆F1) when compared to the I-PD controller optimized with MOA techniques.
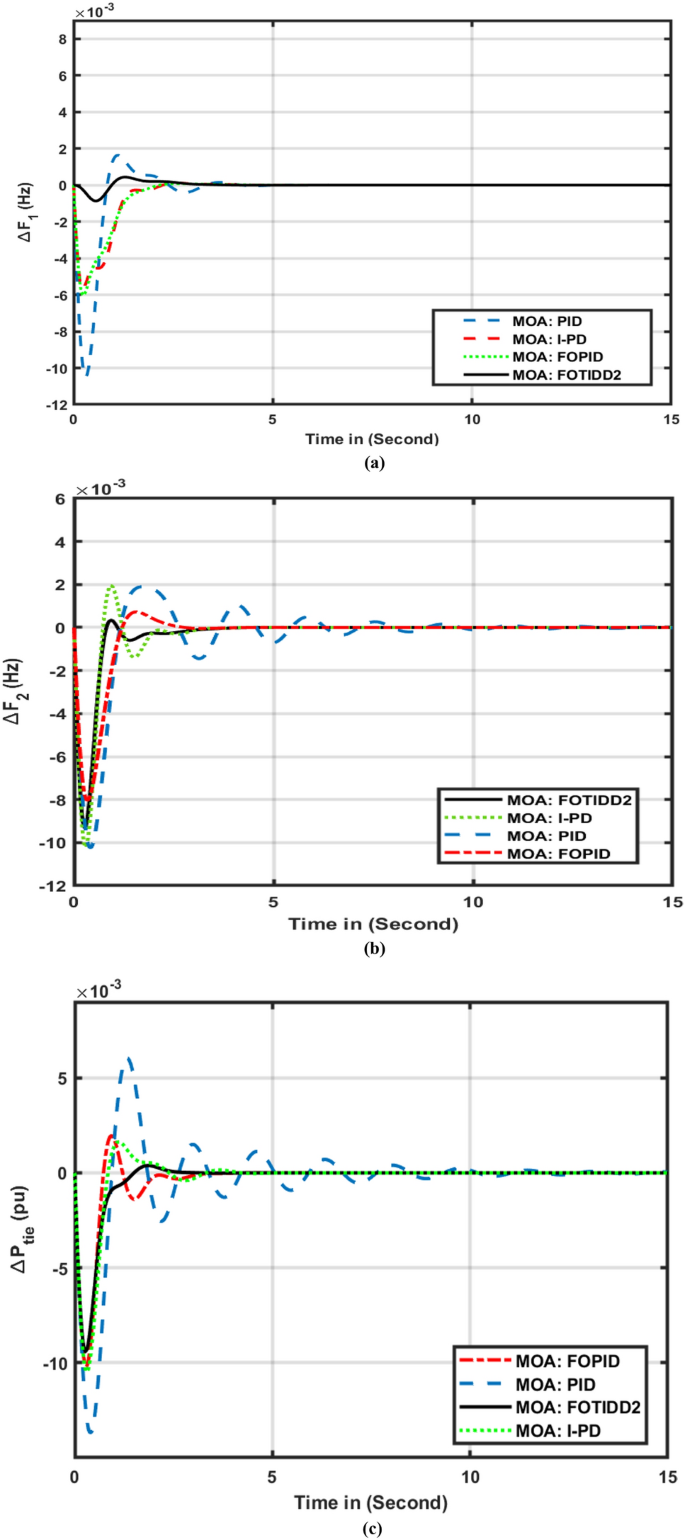
Dynamic response of various controllers (a) ∆F1 (b) ∆F2, (c) ∆Ptie.
Scenario-3
In scenario 3, the impact of adding CES and BESS units for a connected hybrid power system is examined. The effectiveness of the system is evaluated using an MOA-based FOTIDD2 controller with and without BESS and CES effects. Figure 7a–c shows the findings for ∆F1, ∆F2, and ∆Ptie, respectively, demonstrating the superior performance of the MOA based BESS and CES model. The response of the power system combined with CES and BESS unit is better than a system without the effects of the BESS and CES unit in terms of settling time (11.11%, 15.12%, and 16.33%), overshoot (75.13%, 61.22%, and 59.23%), and undershoot (64.23%, 72.11%, and 81.98%), for (∆F1), (∆F2), and (∆Ptie) respectively. Figure 7a–c shows that when BESS and CES are used together, the system’s reaction is much better than when they are not, in terms of area and tie line power both. In addition, Table 5 demonstrates the overall transient comparison that indicates that our proposed method performs marvelously when amalgamated with BESS and CES.
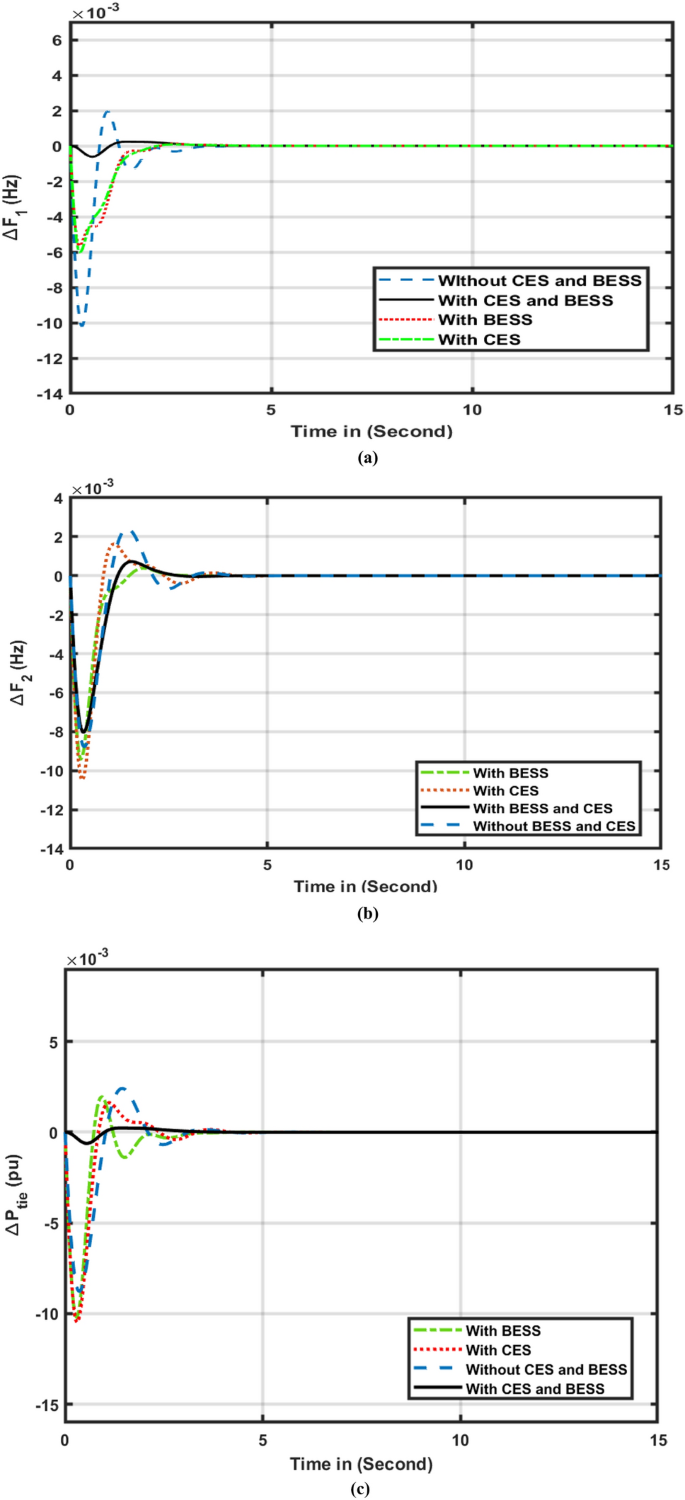
Consideration of case 3 in the system’s dynamic response, (a) ∆F1 (b) ∆F2, (c) ∆Ptie.
Sensitivity analysis/robustness
The controller’s performance needs to be dependable even when parameters are uncertain, because the system models it uses are mathematically flexible and because the arrangement and parameters of the system can change over time due to component deterioration. The stability of the system may occasionally experience issues when the suggested control scheme is unable to cope with the system parametric fluctuations. In order to confirm that the proposed controller is robust, several metrics for parameters like KP, R, and TP have been adjusted by about ± 40% in comparison to their real parameter response. To demonstrate the recommended controller’s reliability when constraint uncertainty is present, the results obtained by varying the system parameters are shown in Figs. 8, 9, and Table 6. As seen in Table 6, a large number of parameters exhibit responses close to their nominal values. The data shows that the suggested MOA-FOTIDD2 controller provides reliable performance across about ± 40% of the system factors. Additionally, the proposed controller’s optimal values don’t require retuning for a variety of parameters when used with actual parameters at rated value. Moreover, the Bode diagram in Fig. 10 illustrates the stability of the system when employing the recommended FOTIDD2 controller. In Fig. 10, the phase margin (PM), gain crossover frequency (ωgc), gain margin (GM), and phase crossover frequency (ωpc) are found to be 30.1 degrees, 17.1 rad/s, 23.6 dB, and 76.3 rad/s, respectively. The positive values of both GM and PM, with PM surpassing GM, and ωgc being less than ωpc, indicate the system’s stability.
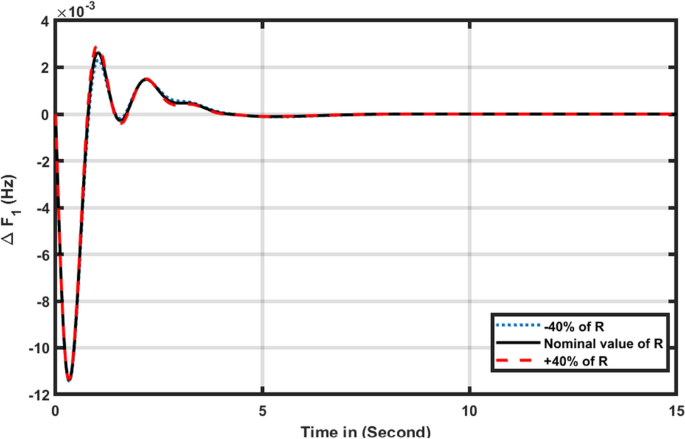
Variation in system parameters (R) for area 1.
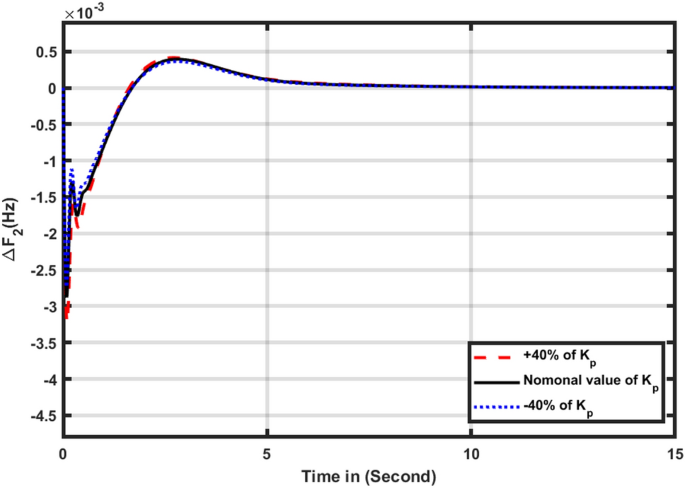
Variation in system parameters (Kp) for area 2.
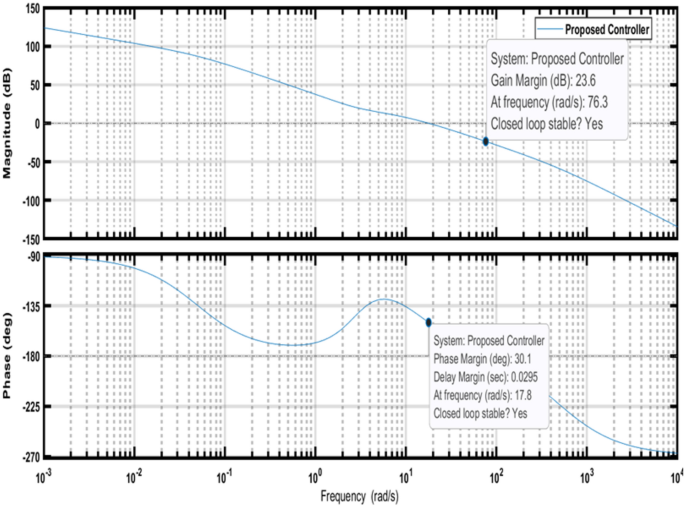
Stability analysis for the FOTIDD2 controller.
Conclusion and future study
For the LFC of two regions’ worth of hybrid power sources—including integrated capacitive energy storage, battery energy storage, bio-diesel generator, sea wave energy, wind, and solar power, this research builds and develops the FOTIDD2 controller. To fine-tune the FOTIDD2 controller’s coefficients for the proposed power system, a novel and powerful meta-heuristic approach called the mother optimization algorithm is employed. The MOA based tuned FOTIDD2 controller was found to be more effective than the MOA tuned PID controller at reducing overshoot (Osh) by 49.31%, 33.78% and 67.99%, improving time settlement by 33.22%, 29.87%, and 22.45% and reducing undershoot (Ush) by 29.13%, 39.34%, and 56.90% for the (∆F1), (∆F2), and (∆Ptie), respectively. Similarly, the proposed MOA- FOTIDD2 controller significantly reduced undershoot by (78.22%, 56.12% and 66.87%), reduced Osh by (89.23%, 78.45%, and 82.34%) and improve settling time by (12.34%,56.33%, and 34.78%) as compared to WCA-based tuned I-TD controllers. Furthermore, taking into account the effects of BESS and CES in respect to Osh, Ts, and Ush improves the system’s dynamic responsiveness compared to when these effects are neglected for (∆F1), (∆F2), and (∆Ptie). To assess the performance of the suggested FOTIDD2 controller in addressing the LFC problem, the system’s characteristics were deliberately altered by ± 40%. The controller demonstrated incredible robustness under these deviations. In future work, advanced fractional order controllers will be incorporated into the comparative analysis to further validate the superiority of the proposed controller. Additionally, more comprehensive modeling and simulation analysis for each renewable energy source will be considered.
Data availability
All data generated or analyzed during this study are included in this published article [and its supplementary information files].
Abbreviations
- SWE:
-
Sea wave energy
- LFC:
-
Load frequency control
- AVR:
-
Automatic voltage regulator
- IPS:
-
Interconnected power system
- RES, s:
-
Renewable energy sources
- SLP:
-
Step load perturbation
- FOA:
-
FOX optimization algorithm
- PID:
-
Proportional integral derivative
- WOA:
-
Whale optimization algorithm
- FOTIDD2
: -
Fractional order tilt integral with double derivative
- PIDF:
-
Proportional-integral-derivative filter
- ITAE:
-
Integral time absolute error
- SWE:
-
Sea wave energy
- TF:
-
Transfer function
- TIDN:
-
Tilt integral derivative with filter
- FLC:
-
Fuzzy logic control
- FO:
-
Fractional order
- TF:
-
Transfer function
- CTD:
-
Communication time delay
- GWO:
-
Grey wolf optimizer
- CF:
-
Cost function
- SCA:
-
Sine cosine algorithm
- FES:
-
Flywheel energy storage
- ITSE:
-
Integral time square error
- MOA:
-
Mother optimization algorithm
- Tp:
-
Time constant of power system
- MG:
-
Microgrid
- HMG:
-
Hybrid microgrid
- Ub:
-
Upper boundary
- ISE:
-
Integral square error
- Tw:
-
Wind time constant
- Lb:
-
Lower boundary
- Kwave:
-
Gain of wave energy
- CES:
-
Capacitive energy storage
- BDG:
-
Bio diesel generator
- ESS:
-
Energy storage system
- AGC:
-
Automatic generation control
- BES:
-
Battery energy storage
- PS:
-
Power system
- WT:
-
Wind turbine
- GHS:
-
Greenhouse gas
- R:
-
Speed regulation
- ΔPG:
-
Output deviation of a generator
- ∆F:
-
Frequency deviation
- Osh
: -
Overshoot
- Kpv
: -
Photovoltaic gain constant
- Tpv
: -
Photovoltaic time constant
- M:
-
Inertia constant
- ST
: -
Settling time
- Ush
: -
Undershoot
- Ttie
: -
Tie-line
- ΔXG:
-
Valve position of Governor
References
-
Zhang, G. et al. Driver training based optimized fractional order PI-PDF controller for frequency stabilization of diverse hybrid power system. Fractal Fract. 7, 315. https://doi.org/10.3390/fractalfract7040315 (2023).
-
Iris, Ç. & Lam, J. S. L. A review of energy efficiency in ports: Operational strategies, technologies and energy management systems. Renew. Sustain. Energy Rev. 112, 170–182 (2019).
-
Ranjan, M. & Shankar, R. A literature survey on load frequency control considering renewable energy integration in power system: Recent trends and future prospects. J. Energy. Storage 45, 2022. https://doi.org/10.1016/j.est.2021.103717 (2021).
-
Alrajhi, H. A novel synchronization method for seamless microgrid transitions. Arab. J. Sci. Eng. https://doi.org/10.1007/s13369023-08454-9 (2023).
-
Latif, A. et al. Double stage controller optimization for load frequency stabilization in hybrid wind-ocean wave energy based maritime microgrid system. Appl. Energy 282, 116171 (2021).
-
Daraz, A. Optimized cascaded controller for frequency stabilization of marine microgrid system. Appl. Energy 350, 121774. https://doi.org/10.1016/j.apenergy.2023.121774 (2023).
-
Kalyan, C. N. S. et al. Water-cycle-algorithm-tuned intelligent fuzzy controller for stability of multi-area multi-fuel power system with time delays. Mathematics 10, 508. https://doi.org/10.3390/math10030508 (2022).
-
Singh, K., Dahiya, M., Grover, A., Adlakha, R. & Amir, M. An effective cascade control strategy for frequency regulation of renewable energy-based hybrid power system with energy storage system. J Energy Storage 68, 107804 (2023).
-
Khamies, M., Magdy, G., Kamel, S. & Khan, B. Optimal model predictive and linear quadratic Gaussian control for frequency stability of power systems considering wind energy. IEEE Access 9, 116453–116474 (2021).
-
Magdy, G., Shabib, G., Elbaset, A. A. & Mitani, Y. Optimized coordinated control of LFC and SMES to enhance frequency stability of a real multi-source power system considering high renewable energy penetration. Prot. Control. Mod. Power Syst. 3, 39 (2018).
-
Ramesh, M., Yadav, A. K. & Pathak, P. K. Artificial gorilla troops optimizer for frequency regulation of wind contributed microgrid system. ASME. J. Comput. Nonlinear Dyn. 18(1), 011005. https://doi.org/10.1115/1.4056135 (2023).
-
Jagatheesan, K., Anand, B., Dey, N., Ashour, A. S. & Balas, V. E. Load frequency control of hydro-hydro system with fuzzy logic controller considering non-linearity. In Recent Developments and the New Direction in Soft-Computing Foundations and Applications 307–318 (Springer, 2018).
-
Sah, S. V., Prakash, V., Pathak, P. K. & Yadav, A. K. Fractional order AGC design for power systems via artificial gorilla troops optimizer. In 2022 IEEE International Conference on Power Electronics, Drives and Energy Systems (PEDES), Jaipur, India, 1–6 (2022). https://doi.org/10.1109/PEDES56012.2022.10079975.
-
Sharma, M., Dhundhara, S., Arya, Y. & Prakash, S. Frequency excursion mitigation strategy using a novel COA optimised fuzzy controller in wind integrated power systems. IET Renew. Power Gener. 14, 4071–4085 (2020).
-
Tasnin, W., Saikia, L. C. & Raju, M. Deregulated AGC of multi-area system incorporating dish-stirling solar thermal and geothermal power plants using fractional order cascade controller. Int. J. Electr. Power Energy Syst. 101, 60–74 (2018).
-
Nandi, M., Shiva, C. K. & Mukherjee, V. Moth-flame algorithm for TCSC-and SMES-based controller design in automatic generation control of a two-area multi-unit hydro-power system. Iran. J. Sci. Technol. 44, 1173–1196 (2020).
-
Jagatheesan, K., Baskaran, A., Dey, N., Ashour, A. S. & Balas, V. E. Load frequency control of multi-area interconnected thermal power system: Artificial intelligence-based approach. Int. J. Autom. Control 12, 126–152 (2018).
-
Eltamaly, A. M., Zaki Diab, A. A. & Abo-Khalil, A. G. Robust control based on H∞ and linear quadratic gaussian of load frequency control of power systems integrated with wind energy system. In Control and Operation of Grid-Connected Wind Energy Systems 73–86 (Springer, 2021).
-
Yakout, A. H., Kotb, H., Hasanien, H. M. & Aboras, K. M. Optimal fuzzy PIDF load frequency controller for hybrid microgrid system using marine predator algorithm. IEEE Access 9, 54220–54232 (2021).
-
Habib, D. Optimal control of PID-FUZZY based on gravitational search algorithm for load frequency control. Int. J. Eng. Res. 8, 50013–50022 (2019).
-
Sharma, J., Hote, Y. V. & Prasad, R. Robust PID load frequency controller design with specific gain and phase margin for multi-area power systems. IFAC-Pap. 51, 627–632 (2018).
-
Magdy, G., Mohamed, E. A., Shabib, G., Elbaset, A. A. & Mitani, Y. SMES based a new PID controller for frequency stability of a real hybrid power system considering high wind power penetration. IET Renew. Power Gener. 12, 1304–1313 (2018).
-
Hasan, N., Asaidan, I., Sajid, M., Khatoon, S. & Farooq, S. Robust self tuned AGC controller for wind energy penetrated power system. Ain Shams Eng. J. 13(4), 101663 (2022).
-
Barkat, M. Novel chaos game optimization tuned-fractional-order PID fractional-order PI controller for frequency control of interconnected power systems. Prot. Contr. Modern Power Syst. 7, 16 (2022).
-
Daraz, A. et al. Improved-fitness dependent optimizer based FOI-PD controller for automatic generation control of multi-source interconnected power system in deregulated environment. IEEE Access 8, 197757–197775 (2020).
-
Pawan, K. P. & Anil, K. Y. Fuzzy assisted optimal tilt control approach for LFC of renewable dominated micro-grid: A step towards grid decarbonization. Sustain. Energy Technol. Assess. 60, 103551. https://doi.org/10.1016/j.seta.2023.103551 (2023).
-
Ahmed, E. M., Mohamed, E. A., Elmelegi, A., Aly, M. & Elbaksawi, O. Optimum modified fractional order controller for future electric vehicles and renewable energy-based interconnected power systems. IEEE Access 9, 29993–30010 (2021).
-
Latif, A., Hussain, S. M. S., Das, D. C. & Ustun, T. S. Optimum synthesis of a BOA optimized novel dual-stage PI − (1 + ID) controller for frequency response of a microgrid. Energies 13, 3446 (2020).
-
Priyadarshani, S., Subhashini, K. R. & Satapathy, J. K. Pathfinder algorithm optimized fractional order tilt-integral-derivative (FOTID) controller for automatic generation control of multi-source power system. Microsyst. Technol. 27, 23–35 (2021).
-
Daraz, A., Malik, S. A., Basit, A., Aslam, S. & Zhang, G. Modified FOPID controller for frequency regulation of a hybrid interconnected system of conventional and renewable energy sources. Fractal Fract. 7, 89 (2023).
-
Khokhar, B., Dahiya, S. S. & Singh Parmar, K. P. Atom search optimization based study of frequency deviation response of a hybrid power system. In Proceedings of the 2020 IEEE 9th Power India International Conference (PIICON), Murthal, India, 28 February–1 March, 1–5 (2020).
-
Daraz, A. et al. Frequency regulation of interconnected hybrid power system with assimilation of electrical vehicles. Heliyon 10(6), e28073. https://doi.org/10.1016/j.heliyon.2024.e28073 (2024).
-
Pathak, P. K., Yadav, A. K., Padmanaban, S. & Kamwa, I. Fractional cascade LFC for distributed energy sources via advanced optimization technique under high renewable shares. IEEE Access 10, 92828–92842. https://doi.org/10.1109/ACCESS.2022.3202907 (2022).
-
Aryan, P., Ranjan, M. & Shankar, R. Deregulated LFC scheme using equilibrium optimized Type-2 fuzzy controller. In Proceedings of the International conference on Innovative Development and Engineering Applications, Gaya, India, 8–10 February 2021.
-
Malik, S. & Suhag, S. A novel SSA tuned PI-TDF control scheme for mitigation of frequency excursions in hybrid power system. Smart Sci. 8, 202–218 (2020).
-
Pawan, K. P. & Anil, K. Y. Design of optimal cascade control approach for LFM of interconnected power system. ISA Trans. 137, 506–518. https://doi.org/10.1016/j.isatra.2023.01.029 (2023).
-
Arya, Y. A novel CFFOPI-FOPID controller for AGC performance enhancement of single and multi-area electric power systems. ISA Trans. 100, 126–135 (2020).
-
Lurie B. J. Three-parameter tunable tilt-integral-derivative (TID) controller. US Patent. 5,371,670 (1994).
-
Sahu, R. K., Sekhar, G. C. & Priyadarshani, S. Differential evolution algorithm tuned tilt integral derivative controller with filter controller for automatic generation control. Evol. Intell. 14(1), 5–20 (2021).
-
Kumari, S. & Shankar, G. Novel application of integral-tilt-derivative controller for performance evaluation of load frequency control of interconnected power system. IET Gener. Transm. Distrib. 12(14), 3550–3560 (2018).
-
Ali, M., Kotb, H., Aboras, K. M. & Abbasy, N. H. Design of cascaded PI-fractional order PID controller for improving the frequency response of hybrid microgrid system using gorilla troops optimizer. IEEE Access 9, 150715–150732 (2021).
-
Arya, Y. AGC performance enrichment of multi-source hydrothermal gas power systems using new optimized FOFPID controller and redox flow batteries. Energy 127, 704–715 (2017).
-
Arya, Y. AGC of PV-thermal and hydro-thermal power systems using CES and a new multi-stage FPIDF-(1+PI) controller. Renewab Energy 134, 796–806 (2019).
-
Prakash, A., Murali, S., Shankar, R. & Bhushan, R. HVDC tie-link modeling for restructured AGC using a novel fractional order cascade controller. Electr. Power Syst. Res. 170, 244–258 (2019).
-
Elkasem, A. H. A., Khamies, M., Hassan, M. H., Agwa, A. M. & Kamel, S. Optimal design of TD-TI controller for LFC considering renewables penetration by an improved chaos game optimizer. Fractal Fract. 6, 220 (2022).
-
Mohamed, T. H., Shabib, G., Abdelhameed, E. H., Khamies, M. & Qudaih, Y. Load frequency control in single area system using model predictive control and linear quadratic Gaussian techniques. Int. J. Electr. Energy 3, 141–143 (2015).
-
Daraz, A. et al. Fitness dependent optimizer-based automatic generation control of multi-source interconnected power system with non-linearities. IEEE Access 8, 100989–101003 (2020).
-
Kumari, S., Shankar, G. & Das, B. Integral-tilt-derivative controller based performance evaluation of load frequency control of deregulated power system. In Modeling, Simulation and Optimization 189–200 (Springer, 2021).
-
Singh, K., Amir, M., Ahmad, F. & Khan, M. A. An integral tilt derivative control strategy for frequency control in multimicrogrid system. IEEE Syst. J. 15, 1477–1488 (2021).
-
Ahmed, M., Magdy, G., Khamies, M. & Kamel, S. Modified TID controller for load frequency control of a two-area interconnected diverse-unit power system. Int. J. Electr. Power Energy Syst. 135, 107528 (2022).
-
Matoušová, I. et al. Mother optimization algorithm: a new human-based metaheuristic approach for solving engineering optimization. Sci. Rep. 13, 10312. https://doi.org/10.1038/s41598-023-37537-8 (2023).
-
Almasoudi, F. M., Magdy, G., Bakeer, A., Alatawi, K. S. S. & Rihan, M. A new load frequency control technique for hybrid maritime microgrids: Sophisticated structure of fractional-order PIDA controller. Fractal Fract. 7, 435 (2023).
-
Zhang, G., Khan, I. A., Daraz, A., Basit, A. & Khan, M. I. Load frequency control of marine microgrid system integrated with renewable energy sources. J. Mar. Sci. Eng. 11, 844 (2023).
-
Khokhar, B., Dahiya, S. & Parmar, K. P. S. A robust cascade controller for load frequency control of a standalone microgrid incorporating electric vehicles. Electr. Power Compon. Syst. 48, 711–726 (2020).
-
Ray, P. K., Mohanty, S. R. & Kishor, N. Proportional–integral controller based small-signal analysis of hybrid distributed generation systems. Energy Convers. Manag. 52(4), 1943–1954. https://doi.org/10.1016/j.enconman.2010.11.011 (2011).
-
Das, D. C., Roy, A. & Sinha, N. GA based frequency controller for solar thermal–diesel–wind hybrid energy generation/energy storage system. Int. J. Electr. Power Energy Syst. 43, 262–279 (2012).
-
El-Fergany, A. A. & El-Hameed, M. A. Efficient frequency controllers for autonomous two-area hybrid microgrid system using social-spider optimizer. IET Gener. Transm. Distrib. 11, 637–648 (2017).
-
Huang, J., Yang, J., Xie, D. & Wu, D. Optimal sliding mode chaos control of direct-drive wave power converter. IEEE Access 7, 90922–90930 (2019).
-
Hasanien, H. M. Transient stability augmentation of a wave energy conversion system using a water cycle algorithm-based multiobjective optimal control strategy. IEEE Trans. Ind. Inform. 15, 3411–3419 (2018).
-
Yidie, Y., Amil, D., Abdul, B., Irfan, A. K. & Salman, A. A. Cascaded fractional-order controller based load frequency regulation for diverse multigeneration sources incorporated with nuclear power plant. Int. J. Energy Res. 2024, 7939416. https://doi.org/10.1155/2024/7939416 (2024).
-
Daraz, A. et al. Load frequency stabilization of distinct hybrid conventional and renewable power systems incorporated with electrical vehicles and capacitive energy storage. Sci. Rep. 14, 9400. https://doi.org/10.1038/s41598-024-60028-3 (2024).
Author information
Authors and Affiliations
Contributions
Conceptualization, H.A. and M.B. Data curation, G.Z. and K.X. Formal analysis, M.B. Methodology, A.D. and A.B. Software, A.D. and A.A.; Supervision, H.A.; Validation, H.A., A.B., A.A., A.A. and K.X.; Writing—original draft, A.D.; Writing—review & editing, H.A., A.B., A.A., A.A., G.Z., M.B., and K.X.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article
Cite this article
Daraz, A., Alrajhi, H., Alahmadi, A.N.M. et al. Frequency stabilization of interconnected diverse power systems with integration of renewable energies and energy storage systems.
Sci Rep 14, 25655 (2024). https://doi.org/10.1038/s41598-024-76980-z
-
Received: 20 May 2024
-
Accepted: 18 October 2024
-
Published: 27 October 2024
-
DOI: https://doi.org/10.1038/s41598-024-76980-z
Keywords
Search
RECENT PRESS RELEASES
Related Post




{kind=link}
{kind=link}
{kind=link}
{kind=link}